

Mechanical engineers at Rice University’s George R. Brown School of Engineering built a pneumatic arm-like device that can grasp and carry small objects using a textile-based energy harvesting system. This lightweight robotic limb is intended to assist individuals with limited mobility and is tough enough for everyday use.
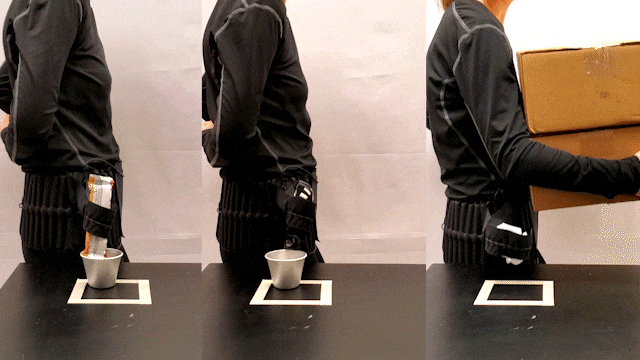
The pneumatic “arm” consists of heat-sealable fabrics stacked together to form two separate bladders. The actuation bladder extends away from the body when unpressurized and curls and deflates when pressurized. The supporting bladder remains pressurized to mechanically support the actuation bladder. The arm’s surface has an elastomer lining to maintain its grip on slippery objects.

Textile pumps embedded in the soles of walking shoes harvest air pressure produced when the wearer steps down. The pumps are small, comfortable to walk on, and filled with open-cell polyurethane foam to recover their shape after every footfall. An energy storage bladder around the waist stores the pressurized air, and the pneumatic actuator applies the pressure when the wearer activates the arm.

“We chose a pneumatic approach for our wearable energy harvesting system to reduce weight and maintain comfort,” said Daniel Preston, assistant professor of mechanical engineering. “The entire system weighs only 140 grams, less than 10% of the weight of comparable electronic approaches.”
For demonstrations, the wearer currently uses a switch to operate the arm, but future versions could have sensors that anticipate the wearer’s intent and perform the movement.
Lab tests showed that the device produces the equivalent of 3 W of power with a conversion efficiency of more than 20%, outperforming electromagnetic, piezoelectric, and triboelectric strategies for foot-strike energy harvesting.
Components for a single device cost the lab about $20. The device is simple to assemble and robust enough to withstand a washing machine with no performance degradation.
“The fabrication approach uses techniques that are already employed in the garment industry, things like cutting textile sheets and bonding them with heat and pressure,” said Preston.
Along with test units, the lab also developed mathematical models to predict how well the assistive device would perform based on body weight, walking speed, and other parameters so that, in the future, they can optimize performance for specific user groups.

The pneumatic arm is just one of several ideas that Preston’s lab team has designed and implemented. Inspired by spiders’ natural hydraulic limb systems, they created “necrobotic” grabbers from dead spiders that can pick up and move small items. They also built a shirt with a bellows-like actuator attached at the armpit that expands, enabling the wearer to pick up a 10-lb object.
“Census statistics say there are about 25 million adults in the United States who find it difficult to lift 10 lbs with their arms,” said Anoop Rajappan, a postdoc supported by the Rice Academy of Fellows. “That’s something we commonly do in our daily lives, picking up household objects or even a baby.”
Tests on mannequins showed that the armpit actuator could lift an object without assistance from human muscles.
With their energy-harvesting system and pneumatic actuators, Preston’s lab team is thinking about how to translate their work into wearable products like gloves that help people close their hands. They are also thinking about portability and how to redesign devices that rely on rigid, bulky power supplies and are either uncomfortable or tether people to external infrastructure.
“We’re also thinking about devices like pneumatic actuators that apply therapeutic compression for things like deep vein thrombosis — blood clots in the legs. Anything that requires air pressure can be powered by our system,” said Rajappan.
Conversations with fashion consultants could also be in Preston’s future to keep wearers from resembling the Michelin Man.
“We’ve managed to keep it quite low profile, but yes, that’s definitely something to think about, especially with the actuators,” said Preston.
Fluidic actuation underpins most new technology in the growing field of soft robotics. Pneumatic actuation is particularly preferred in soft wearable robots and devices that assist human motion to enable lightweight, comfortable designs. Preston expects to see widespread use of commercially available assistive technologies that rely on pneumatic actuation within the next decade.
Preston Innovation Laboratory
pi.rice.edu
Leave a Reply