

There’s a growing interest in nontraditional pneumatic end effectors that offer flexibility and a deft touch.
Pneumatic grippers have been used for decades to pick up, carry and place everything from tiny electronic components to sizeable objects like engine blocks and lumber. Most have rigid fingers or jaws, usually made of steel or aluminum.

Such devices work well in highly repetitive industrial and manufacturing operations, often with great precision. But they’re not so adept at less structured tasks, such as grasping products that are delicate or vary in size and shape. As a result, many operations still rely on manual assembly and handling.
That world is changing. Robotics technology is rapidly advancing with developments like soft robots and cobots—versatile machines that can work side-by-side with people in food harvesting, medical assistance, warehousing and other non-traditional settings. Likewise, there is a growing demand for new types of robotic end effectors, such as soft grippers, to aid in the automation push.
Soft grippers, unlike conventional mechanical devices, are made of compliant materials and are frequently powered by compressed air. Interest is on the rise with the growing demand for more-versatile devices that can interact in less-structured environments. For example, automated harvesting and packaging of fruits and vegetables requires grippers that can handle delicate products that would be easily damaged by typical hard grippers. Likewise, e-commerce warehouses need grippers that can manipulate packages of various sizes, shapes and weights.
Soft grippers offer numerous benefits over their more-rigid counterparts. Thanks to the inherent cushioning of pneumatics they can conform to surfaces or objects, absorb energy to maintain stability, exhibit physical robustness and human-safe operation at potentially low cost. Internal pressure resists buckling and distributes stresses throughout the structure. Porting compressed air in and out of the system controls motion.
With few parts, they eliminate bearings, shafts and other mechanisms. The devices typically weigh less and can be safer than traditional end-effectors because they minimize impact forces in the event of a collision. The downside, important in some applications, is that they sacrifice accuracy for compliance.
Soft grippers open the door to the handling of products that heretofore were difficult or impossible to automate. As a result, they may relieve human workers from many monotonous or dangerous tasks. Researchers at universities and R&D labs across the globe are pushing the envelope of soft gripper technology. Here’s a closer look at some new innovations, as well as a few tried-and-true designs.
Soft Robotics
Soft Robotics Inc., a Harvard University spin-off formed six years ago, has developed a number of pneumatic grippers that largely focus on food handling, packaging and industrial applications. According to company officials, a major limitation in the adoption of robot manipulation systems is lack of access to flexible gripping mechanisms that allow not only pick up but also dexterous manipulation of everyday objects.
They’re attacking that problem by designing and building a system consisting of soft robotic grippers, as well as a control system and software that lets a single engineered device manipulate items of varying size, shape and weight.
The result, they say, is a fundamentally new class of robotic grippers that are adaptive, plug and play, repeatable and reliable. What is also notable is that the grippers are designed to mount directly on many existing commercial robots.
They’re suited for warehouse logistics involving unpredictable-size objects; advanced assembly tasks that currently require significant labor; and food handling, where sanitation and delicate manipulation are important. In essence, Soft Robotics soft grippers are designed to excel where conventional robotic technology falls short.
The end effectors reportedly let packaging, food and beverage, and industrial robots adaptively handle varying objects with a single easy-to-use device, eliminating the need for tool changes and complex vision requirements. Its high-speed (>3 Hz) controller with millisecond response ensures repeatable and reliable actions. Compatible with every commercial robot controller on the market, the Soft Robotics control unit provides turnkey integration, enabling users to quickly install and commission the system for new or retrofit applications with no additional components or control hardware.
The control unit runs on 24 Vdc and 0.5 A power. Digital I/O includes four 24-Vdc inputs and two 10-mA outputs. The software lets users control all grip parameters including force, actuator spacing and opening width. And the controller can store up to eight setting profiles (grip and release). The unit is rated IP65, and it requires 85 to 100 psi compressed and 2 to 8 scfm filtered and treated air.
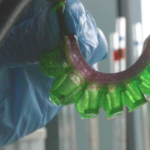
The grippers themselves are made of a soft elastomeric polymer material and come in a range of designs. For example, four-actuator (four finger) circular food-safe grippers are designed for sorting and packaging applications involving delicate produce and bakery items, like apples or small chocolates.
The unit has a mass of 964 gm and measures 160 mm high. It typically can grasp objects with ODs from 40 to 95 mm, with an opposing finger gap of 63.5 mm. Cycle time is 88 msec to close and 166 msec to open, and grip force is 2.5 lb per finger. Operating pressure is 0 to 12 psi and temperature range is -10° to 65°C. Air is supplied via 10 mm diameter, push-to-connect, polyurethane or nylon tubing. The device meets the requirements of FDA-CFR Title 21 for food-contact materials and is rated IP67 protection class.
A similar rectangular version handles products like ears of corn, breadsticks, pastries and stand-up pouches. A five-actuator circular food-safe configuration is suited for objects of varying weight, shape and size like dough balls and hamburger patties.
On the industrial side, the company’s two-actuator automation gripper is a compact and lightweight configuration for bin picking and other applications involving closely grouped objects like pens, small cosmetics and small plastics. The rectangular tool has an opposing finger gap of 15 mm with a typical grasp range of 1 to 40 mm. Grip cycle time is 124 msec to close and 234 msec to open, again with a finger grip force of 2.5 lb. It is rated IP52 protection class and has a mass of 337 gm.
Larger six-actuator rectangular units are built to handle more substantial objects like large bags, bread loaves, toys and stuffed animals, large pouches and IV bags. Differing actuator lengths are available on the various tools, depending on the application.
A bionic approach

Festo is pioneering soft grippers for use on lightweight robots that are suitable for working along with humans. The work stems from the company’s Bionic Learning Network, where engineers develop nature-inspired technologies for industrial automation in collaboration with leading universities and research institutes. Bionically inspired robots with pneumatic drives are well-suited for collaborative working spaces, according to the company, and could represent a cost-efficient alternative to classic robot concepts.
One such soft bionic gripper, called the OctopusGripper, was introduced at last year’s Hannover Fair in Germany. The device is modeled on an octopus tentacle and consists of a soft silicone structure that features pneumatically controlled kinematics with vacuum-based holding force. Applying compressed air bends the tentacle inwards, letting it wrap around and grip an object in a form-fitting and gentle manner. Two rows of actively and passively controlled suction cups on the inner surface securely attach to and hold a variety of different shaped objects.
Its soft, inherently flexible structure has great potential for use in collaborative, human-safe working spaces in the future, according to Festo. The flexible gripper is used in combination with the company’s BionicMotionRobot and BionicCobot. These pneumatic lightweight robots feature natural movement dynamics modelled on the human arm and elephant trunk.
Another interesting development is Festo’s FlexShapeGripper, a device reportedly modeled on a chameleon’s tongue. The gripper consists of a nontraditional, double-acting cylinder with one chamber filled with compressed air; and a second one permanently filled with water and includes an elastic silicone molding. The volumes of the two chambers are designed to compensate for deformation of the silicone part.
The piston, which separates the two chambers, is fastened with a thin rod on the inside of the silicone cap.
In use, a robot or handling system guides the gripper so the silicone cap contacts the object. This vents the top pressurized chamber; the piston moves upwards by means of a spring support; and the water-filled silicone part pulls itself inwards. Further movement lets the silicone cap wrap itself around the object, resulting in a tight form fit. The elastic silicone construction precisely adapts to a wide range of geometries. The material’s high static friction generates a strong holding force.
The concept has potential to enable various tasks in the factory. For instance, it flexibly grips of a wide range of objects, holds parts in place without consuming energy, and it can pick up and release several objects in a single gripping process.
Proven design

Not all soft grippers represent cutting-edge and futuristic innovations. Firestone Industrial Products, a unit of Bridgestone, has offered its AirPicker and AirGripper devices for a number of years. These well-proven designs are based on the rugged, fabric-reinforced rubber construction used on its bellows-type industrial air springs and flexible actuators.
The handling units, due to their flexible inflatable rubber shape, can attach themselves to fragile or sensitive items of varying dimensions and hold them gently and securely in place. Typical applications include handling test tubes, bottles, and cylinders, and are used in assembly, loading, conveying and other manufacturing operations.
The AirPicker end effector inserts into a product while deflated, and then pneumatically inflates outwardly to establish an inner seal and hold the product’s interior walls—letting it be picked up and moved mechanically. The AirGripper collars around a product, then the sleeve inflates inwardly to form a grip around the product’s exterior.
According to the company, the devices are suitable for objects varying in shape or size and offer a wide range of advantages over traditional pick-and-place devices. By simply controlling the pressure within the bladder, they can handle delicate objects securely but with a soft touch. The products are suited to a wide range of diameters and workpiece weights—offering a low cost, durable solution for robotics or mechanical handling systems.
Among the reported advantages, the inflatable rubber construction allows a multiple number of shapes and sizes to be handled with one model. The AirPicker diameter can nearly double over its deflated diameter, while an AirGripper can grip around an object that is only 40% of the deflated diameter. Controlling the pressure in the bladder controls the force on the object, and holding force is distributed over a greater surface area than in a mechanical gripper, resulting in a soft and secure gripping and higher load-carrying capacity. Rigid mechanical grippers, in contrast, only contact a small area with its fingers. The Firestone products also offer non-marring contact, important with glass and plastic objects. And because the units need no seals or bearings, they are more durable than mechanical grippers in dusty environments.
Standard AirPickers can handle objects with IDs from about 0.3 to over 4.0 in. Standard AirGrippers are for objects ranging from 0.2 to 1.8 in. OD. They come in Neoprene and high-temperature silicone constructions, with respective working temperatures from 0° to 165°F (-18° to 74°C) and -22° to 320°F (-30° to 160°C). They typically run on compressed air at pressures to about 70 psi, although models are available with various inflation pressures to handle light to heavy loads. Depending on the size and application, the devices can carry loads well over 50 lb.
Compact ID grippers

Single-acting, pneumatically operated expansion grippers from FIPA gently grip the inner contours of workpieces without leaving any marks, providing an effective alternative to suction cups and sprue grippers for products with holes or recesses, and for hollow extruded and drawn parts.
They are designed to handle lightweight parts and are suitable for integration into other gripper systems. Smaller versions are for diameters from 3 to 10 mm and feature polyamide gripper heads suited for gripping within small recesses and are FDA-approved for direct contact with food.
Larger versions handle an 8 to 85 mm diameter range. They feature high-strength elastomer bellows made of EPDM or silicone, the latter of which is FDA approved for direct contact with food. Temperature working range for EPDM and silicone bellows are up to 130°C (266°F) and 200°C (392°F), respectively.
They expand via pneumatically driven pistons, rather than inflation, to avoid any risk of bursting. Optional sensors can monitor piston position.
The grippers accommodate workpieces with varying sizes and weights exceeding 1 kg. And in combination with an extensive range of mounting elements, they can handle products in almost any orientation. Optimal feed pressure ranges from 6 to 8 bar, although feed pressure and holding force can be adjusted to suit individual workpieces.
Soft grippers and hard knocks

Despite best efforts and novel designs, not all forays into soft grippers are commercially successful—as is the case of Empire Robotics. Most soft grippers rely on some sort of clamping to secure an object. Empire, in contrast, used “jamming” action with its Versaball grippers, which were designed to fit onto existing robot platforms.
The underlying technology is intriguing. The company developed flexible end-effectors based on the jamming phase transition of granular materials. The device consisted of an elastomeric ball filled with a sand-like material. Supplying pressurized air into the ball caused it to soften. Then a robot arm forced it against an object, and venting the air caused the granular material to harden and firmly grip the object. Advantages were said to be inherent flexibility, soft contact and a secure grip on complex parts.
The company sought seed capital from investment funds, won numerous business plan competitions, exhibited at major trade shows and reportedly generated more than a half-million dollars in product sales. It even appeared on The Tonight Show. Unfortunately, commercialization fell short, and Empire Robotics closed up shop last year.



Leave a Reply