

For some 2.2 million patients in the United States suffering from a treatment-resistant neurological disease, needle-based interventions have the potential to provide a minimally-invasive surgical cure. For safety and accuracy, these procedures require visualization of the needle relative to the target and adjacent untreated tissue. This visualization is typically done using magnetic resonance imaging (MRI). Because the magnet bore of the MRI machine closely surrounds the patient (the typical bore diameter is 60 cm), a compact robot is essentially required to access the patient and perform the surgery.
An excellent approach to designing these robots is to use pneumatic actuation, because it has a high power density and can satisfy the requirement of MRI-compatibility. DC motors are not compatible with the strong magnetic field and radiofrequency pulses of an MRI machine. While hydraulic actuation is a viable solution, the pneumatic approach has the added benefit of harnessing as a pressure source the existing instrument air facilities of hospitals.

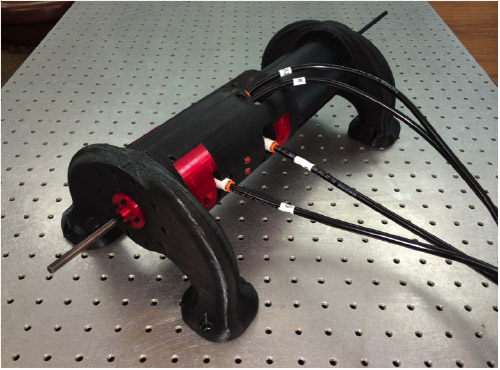
A technical barrier to using pneumatics to actuate MRI-guided surgical robots is that there is no commercial, off-the-shelf pneumatic actuator to satisfy the requirements of being sterilizable, intrinsically safe, and MRI-compatible. Towards solving this problem, research engineers at Vanderbilt University and Milwaukee School of Engineering have created a bellows-type pneumatic stepper actuator, Figure 1. This robot module provides the functionality of a two degree-of-freedom needle driver to translate and rotate the base of one tube of a steerable needle, such as that shown in Figure 2. The robot’s modular design allows for several modules to be cascaded together as a complete actuation unit for steerable needles comprising multiple, concentric tubes. These needles are made from several nested tubes that telescopically extend from one another. Because each individual tube is curved and made of shape-memory alloy, the needle can bend controllably when axial insertions and rotations are applied at tube bases.
On the working prototype of the robot, one helix-shaped bellows and one toroid-shaped bellows respectively provide pure rotation and pure translation in safe, small steps, as shown in Figure 3. Manufacture of these novel bellows designs is made possible by selective laser sintering (SLS), an additive manufacturing process whereby nylon powder is laser sintered together layer-by-layer to make the part. Unsintered powder, which serves as support material for subsequent layers during the build process, is removed from the finished part through clean-out holes, which are afterwards sealed with wax. Manufacture by SLS enables a compact design for the device, as well as hermetic sealing, which prevents contamination in the operating room.

To achieve an intrinsically safe design, mechanical stops limit the bellows’ movements to step sizes of 0.5 mm and 0.5° (for needle tube translations and rotations), which are acceptably safe in the event of a systems failure. Diaphragm-like grippers firmly grasp and impart to the needle tube the translations and rotations. Connected to the robot via long transmission lines, control valves located outside the MRI machine room provide a sequence for charging and exhausting the bellows and grippers, thereby translating and rotating the needle tube in an incremental fashion, much like a mechanical pencil. This behavior is inherently fail-safe.
Most components on the prototype were manufactured by fused deposition modeling on a Makerbot Replicator 2 machine. Thus, the robot was 3D printed and could be a low cost disposable option in surgeries. In a preliminary controls experiment, sub-millimeter positioning accuracy was demonstrated: 0.013 mm steady-state error. This result suggests the pneumatic bellows to be a promising approach to robotic actuation for MRI-guided procedures.
Submitted by David Comber, PhD Candidate, Mechanical Engineering, Vanderbilt University. Advisors: Robert Webster III and Eric Barth. David’s collaborators on this research at MSOE are Jonathon Slightam and his advisor, Vito Gervasi. Follow him on LinkedIn at https://www.linkedin.com/pub/david-comber/34/16a/5a2
Leave a Reply